RoadAI overview
The Vaisala RoadAI system architecture consists of three different components. First, the data is collected with a mobile phone with the RoadAI Mobile Application, then taken through an automated data processing system in the cloud, and lastly managed in RoadAI Web.
Data collection
RoadAI uses a dedicated Android application on a mobile phone to collect video from within vehicles on your road network.
These videos are then processed using computer vision techniques to detect, for example, road condition, traffic signs, and the deterioration of linear road markings.
Videos are recorded in 5‑minute sets that are stored on the phone, and then uploaded via Wi‑Fi or transmitted during the video collection over a mobile network.
The transfer of video data starts automatically once an Internet connection is detected and the files are removed from the phone without any user input.
Data processing
Once the videos have been uploaded onto the RoadAI servers, they are processed using computer vision models to analyze each frame. The computer vision models were developed by processing large numbers of images of the road with different assets, road distresses and weather conditions annotated. The computer vision model can learn what the different distresses and features look like, and then detect these in new images. We have developed several models, each with a different purpose.
- Quality check
- The videos are analyzed to determine environmental conditions present. This includes the weather at the time of survey, the road surface type (asphalt, concrete, cobblestones, gravel, etc.) and state (dry, wet, puddles, flooded, snow, etc.) and lighting conditions. This data is then used to determine if the footage is suitable for further analysis.
-

- Anonymization
-
Videos are processed to anonymize vehicles and people. Videos can only be viewed once they have been through the anonymization process.
The pixels containing information about vehicles and people are removed. The original video is not available.
-

- Road condition data
-
This computer vision model detects distresses and fixes on the road surface, looking to replicate the types detected as part of a visual road condition survey.
The types of distresses and fixes detected include, for example, longitudinal and transverse cracking, potholes, edge deterioration, raveling, binder bleeding, sealing, and patching.
The computer vision model can detect their presence within each 5‑m (16‑ft) section of road, with the extent of the distress or fix determined by its width across the road surface.
-

- Traffic signs
- The computer vision can detect traffic signs in specific countries. Traffic signs are categorized and located based on their positions across the road network.
-

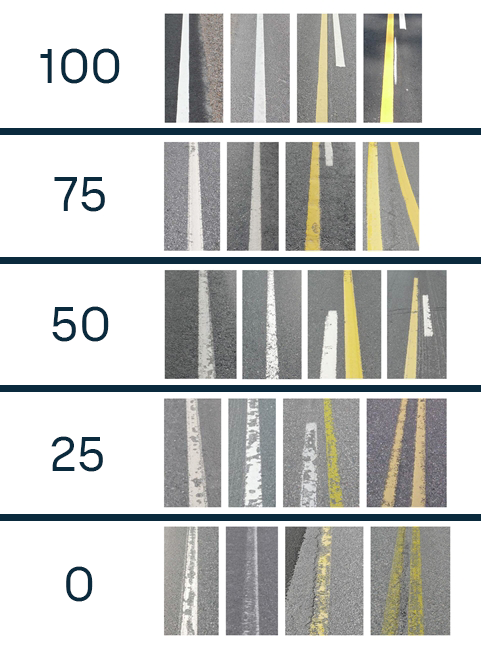
- Line markings
- The deterioration of linear markings is analyzed from the visual characteristics of the lines.
-
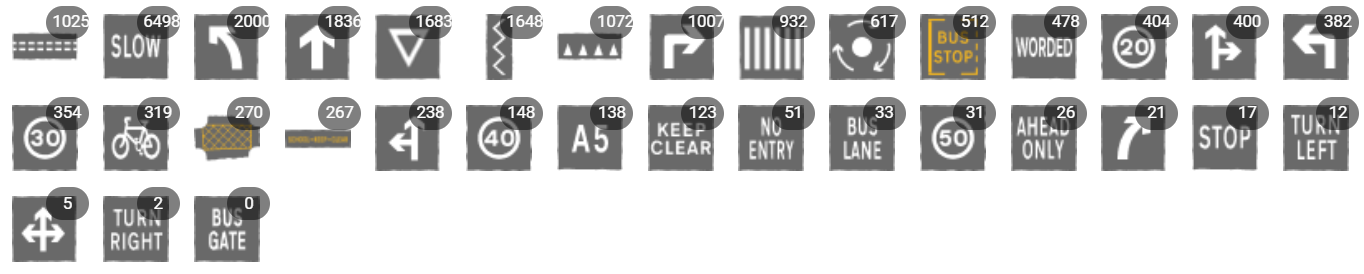
- Surface markings
- The computer vision can detect surface markings in specific countries. Surface markings are categorized and located based on their positions across the road network.
-